Mivel érdeklődött korábban valaki, gondoltam helyzetjelentek a nixie órámmal, illetve a villódzó LED-ekkel kapcsolatban.
1. Átterveztem a NYÁK-ot, és ahogy Prof javasolta, áttértem a teliföldes megoldásra.
Nem is értem, miért nem jutott eszembe, hiszen eleve egyszerűsíti a dolgot az, hogy nem kell a GND-t mindenhova elmadzagolnom...
Talán azért, mert a kínai gyártatás előtt vasaltam a NYÁK-jaimat és azzal nehéz szép teliföldet csinálni, nem tudom.
Minden ostobaságot azért nem sikerült megszüntetnem, mert a rádugós panelt nem akartam újra rajzolni, bár arra is sort kell kerítenem, mert tele van a hócipőm a 74141-ekkel.
Eladott nekem valaki 32 db-ot, amiből 20 db ab start rossz volt és már azóta is cserélnem kellett kettőt... Oké, 40 éves holmi ez is, de azért már na...!
Lehet, hogy az egész BCD dolgot elfelejtem és mivel már amúgy is kell portbővítőt használnom, meghajtom arról direktben a katódokat optó + tranzisztor/FET segítségével, majd még megálmodom.
2. A LED-eknek csináltam saját, dedikált 5V-os tápot.
3. A LED-ek vezérlését teljesen levettem a NYÁK-ról és parasztosan átkötésekkel csináltam meg.
Hogy melyik beavatkozásnak köszönhető, nem tudom, de öröm és boldogság, így nem villognak a LED-ek!
Mindenre megválaszoltál,már régen is gondolkoztam , hogy lehet az , hogy D0-D1 kimeneten kommunikál miközben ott még lehet külső terhelés. Aztán erről meg is feledkeztem és őrületbe kergetett , hogy hol tudtam , hol nem tölteni a programot. Most ezt megbeszéltük. Most feltöltéskor lehúzom a csatlakozót.
A linket amit küldtél megnéztem ,majd ki is próbálom .
Elég lassan haladok, az asztalon minden funkciót lepróbáltam, de ott nem volt zavar, de élesben nagyon kell vigyáznom nehogy túlmenjen a végállásoknál.
Csinált olyant , hogy az váltóáramú motor egyszerre akart fel és le irányba menni szerencsére ez a motornak meg sem kottyant . Pedig leddel próbálva nem volt gond.
Legnagyobb baj , hogy alig látom és már 71 éves vagyok és a sok térdelés sem úgy megy , de szeretem csinálni. Nyáron jó időben az udvaron egy vasasztalon szoktam szerelni, de ez a dög alig fér ki az ajtón és csak a szomszéddal tudjuk cipelni.
A múltkori és kapcsolás segített, most telerakom többszöri keresztreteszeléssel és késleltetésekkel , hogy zavarállóbb legyen.
Te biztosan ismered az NDR-NSR préselhető csatlakozókat , vettem egy készletet, de krimpelő fogót nem vettem , mert bitang drága . Forrasztottam és kombinált fogóval nyomkodtam ez elég lassan haladtam.
A 2560.-ast én Mega.-nak ismertem , bár még nem volt vele dolgom , lehet avval kellet volna kezdenem.
Én most egy időre elvonulok , ha elakadok újra jelentkezem.
Írod a grafikus kijelzőt, ezt már nem fogom megtanulni , maradok a 16x2 és a 20x4 lcd kijelzőknél.
Az, hogy valahonnan van +12V, nem jelenti azt, hogy az "munka" 12V. Javaslom nem a csökkentést, hanem azt, hogy ha egyékbént terhelhető, akkor egy 12V--5V normálisan szűrt kapcsolóüzemő step-down konverterrel oldd meg a tápolást. Az Arduinon lévő táp IC nem túl erős.
Igen, az RX és TX lábakat kód feltöltésnél illik lebegőn hagyni.
Igen, össze lehet, de vagy rx-tx lábakkal (ami ugye a feltöltésbe bele fog szólni), vagy kell generálni egy "kamu" soros vonalat (Software Serial). Utóbbi működik, de zabálja a memóriát és az Arduino keretrendszer által generált alap kód maitt egyébként is szar időzítés miatt nem túl megbízható. De működhet. Példa: https://www.electroniclinic.com/serial-communication-between-two-arduino-boards/ A kártyáknak nincs fizikai címük (soros kommunikációnál legalábbis nincs).
Én helyette egy 2560-at javaslok. Felhasználás tekintetében SEMMI különbség nincs a kettő között. Jóval nagyobb memória, sokkal több ki- és bemenet. Ad abszurdum, az el fog vinni a két soros kijelző helyett egy grafikust is. Szettben is lehetett kapni fillérekért. A színes grafikus kijelzővel nem, de a Megával SOKKAL egyszerűbb dolgod lesz.
- masszírozómotor fel - le 230VAC TRIAC vezérlés olyan mint egy mosógépmotor végállásokkal , ennek HALL szenzoros végállásai vannak.
Asztalon próbálva minden működött , de beépítve meghülyült ,erre számítottam.
az asztalon csak ledek voltak a kimenetek , azok nem okoztak problémát.
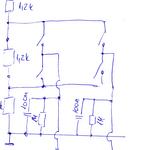
A bemenetekre azA0…. A5 használom, nem árnyékolt a vezeték ezért tettem minden bemenetre 100nF és 1Mohm szűrést. Ez hatékony lett 300-400 digites ugrálás lecsökkent +/- 2-3.-ra.
Egyelőre 2 db Arduino UNO R3 használok , de a 8db levegőszelepet és a kompresszort még nem próbáltam.
A régi vezérlőn van +5 , +12 és +15 volt, a +12.-öt csökkentem 10.-re és a dugós tápnál csatlakoztatom , szerintem ezzel nem lesz problémám .
Most jön a két konkrét kérdésem:
- Mivel a digitális ki és bemenetekkel spórolnom kell ,azt vettem észre ,hogy feltöltéskor le kell húznom a D0 és D1 vezetékeket . Ha nem húzom le , akkor nem fejezi be a feltöltést. Már 3-szor cseréltem , azt hittem tönkre ment. Ugye ez normális ? Ott van a TR és TX.
- 2 Arduinot össze lehet kötni úgy , hogy változót vagy fix szöveget átvihetek egy másik Arduinora .
Erre írna nekem valaki egy rövid példát? Akkor ezt a D0 és D1 kimenetet már nem használhatom másra ?
void loop() { valtozo = valtozo + 1 ; Serial.print (" főpróba "); // ezt a két sort vigyétek át a másik arduinora Serial.println ( valtozo) ; // ezt a két sort vigyétek át a másik arduinora delay (2000) ; }
-.-.--.--.-.--.-
Úgy tudom ezeknek van fizikai címe , hogy tudja melyik Arduino a címzett . Na ezt , hogy tudom meg ?
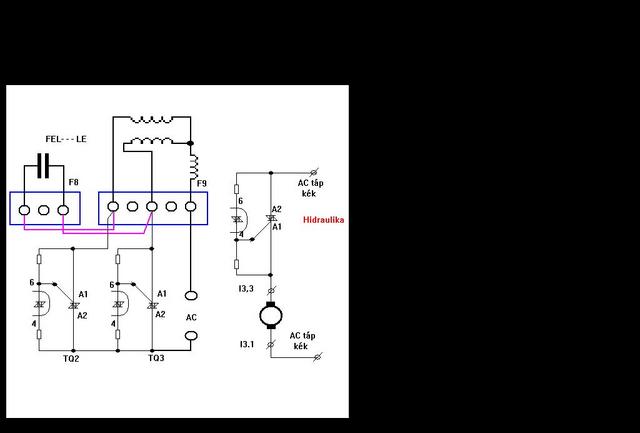
Ez csak nagyjából rajzoltam, még vannak rajt sallangok
Ez a támla fel-le mozgatása , a hidraulika valójában kompresszor csak nekem ezt mondta az eladó.
Az elektronikáról nincs kérdés , nem akarlak megsétáltatni benneteket csak a két kérdés a lényeg.
16x2 lcd kijelzőt használok és csak az egyik gépre akarom tenni.
A szelepek miatt lehet , hogy harmadik Arduino UNO is be kell vetnem .
Tudom létezik a MEGA , de nekem van vagy 8 UNO.-m és ezt valamennyire ismerem.
Tök jól le van írva a gyártói adatlapokban, hogy melyik mikrokontroller mire képes. A legtöbb gyártó még gyakorlati alkalmazási példákat is mellékel.
Ezek univerzális számítógépek. Szinte bármit meg tudsz valósítani bármelyikkel. Kérdés, hogy melyikkel milyen úton. Az egyikkel a fejlesztés lesz gyorsabb, a másikkal a végtermék olcsóbb, a harmadik megoldás pedig kevesebb helyet foglal a NYÁKon, a negyedikhez kevesebb külső komponens kell, az ötödik gyorsabban hajtja végre, a hatodik alig fogyaaszt, stb. Neked kell döntened, mert ezek közül csak párat tudsz egyszerre megvalósítani.
A mikorokontroller választás pedig úgy néz ki, hogy értesz ehhez a szakmához, ismersz néhány terméket, ismered a kapott feladatot. És ehhez a feladathoz választasz eszközt. Kezdőként egy munkahelyen valószínűleg azzal kell dolgoznod, amit egy senior választott. Gyűjtöd a tapasztalatokat, és pár év múlva már lesz elég rálátásod.
Kezdő hobbistaként, akinek nem ez a munkája, mit tehetsz?
Leírod itt a fórumban, hogy mennyire értesz hozzá most, és mit szeretnél megvalósítani. Akkor tudunk segíteni választani.
Ha nincs semmi konkrét célod, csak szeretnéd megtanulni az alapokat, akkor is tudunk javasolni.
Szóval az első kérdés, hogy mit akarsz csinálni. Utána jön az, hogy mivel és hogyan.
Másrészt olyan 1:1 megfeleltethetőség, hogy ez "pontosan" erre, az meg "abszolúte arra" való, nem lehet, mert igazából mindegyikkel meg lehet csinálni (szinte) mindent, csak nem biztos, hogy annyira egyszerű. Nyilván végtelenülle van egyszerűsítve a kijelentés.
De. Alapvetően ahhoz, hogy megértsd, hogy mi miben és mitől más, kell egy alap szintű szakmai hozzáértés. Ezt pl. a Kristálytiszta Elektronika oktatási anyagaiból (az első még Arduinora épült) össze lehet szedni 3-4 hétvége alatt, gyakorlati megközelítésben. Egy X8-hoz azért már nem árt, ha van komoly programozói, programtervezői, rendszerüzemeltetői, beágyazott hardveres tapasztalatod. Nem feltétlen mérnöki diploma, de nulláról rövid úton kudarc (és rengeteg feleslegesen elhardált idő és pénz) a kísérletezés. A beágyazott fejlesztésben az egyik legfontosabb ökölszabály, hogy a projekthez választunk hardvert, nem projektet a hardverhez. Röviden: -- processzor órajel: a feldolgozás sebességét adja meg, minél gyorsabb, annál flottabb a működése számításigényes feladatoknál, -- memória: a betölthető kód méretét dereminálja, minél nagyobb, annál jobb, de itt inkább kilobájtos méretű kódokról beszélünk (amit ma írtam, 132 kbyte, de ez gyakorlatilag csak egy egeret emulál, egy másik, gépet vezérlő az valamivel fél mega alatt van, 4xx kbájt körül áll most, de ezen kijelző, komoly analóg feldolgozó van), -- portok: a kívülről jövő és a kifelé menő mindenféle jelek számosságát korlátozzák. Egy "sima" kijelző 5 port, egy SPI-s 4 (vagy 3 vagy 5), i2c-n meghajtott 2 port. Egy gomb 1 port, de egy 4x4-es billentyűzet már 8. -- egyebek, erre kevés példát hozok: milyen kommunikációs protokollokat ismer alapból az eszköz (SPI, i2c, UART, CAN, i2s stb.), vagy például a már kivezetett Leonardo tudott egérként vagy billentyűzetként funkcionálni (ún. USB-HID eszközként), vannak olyanok, amin van wifi, vagy bluetooth, vagy GSM, vagy LoRa, vagy ezek tetszőleges kombinációja, -- forma: a "lábasok" próbapanelbe dugva muzsikálnak jól (pl. Nano), a dugaszolhatók meg önállóan, inkább shieldekkel (rádugható kiegészítő panelekkel). Előbbi megoldás nagyobb szabadságot ad, de a kevés kivezetés gondot okozhat. Én egyetlen kivétellel mindent Nanora terveztem, ami a kivétel volt, az MEGA2560 volt, mert a kód is baromi nagy volt és a lábak jelentős része is használatban volt benne. -- 8 vagy 32 bit -- ez nehéz kérdés, alapból 8 biten azért komoly és pontos számítást, megbízható analóg feldolgozást (kellő pontossággal) nagyon nehéz, illetve sokszor lehetetlen megcsinálni (illetve lehet 8 biten is 32 bites mélységben számolni, de nagyon csúnyán lefekteti a kis órajelű IC-t, mert amit a 32 bites megcsinál direkt regiszterből 2-4 órajelcikus alatt, annak itt több tucat órajelcikus kell, mert előbb 8 bitessé kell szétszedni a számokat, elvégezni velük a műveletet, majd visszakonvertálni 32 bitre. Ráadásul maga a kód, ami ezt megcsinálja, egy monstrum.
Nagyjából ennyi.
Ahogy azt már n+1 alkalommal felvetettük, a fő kérdés, hogy mi a célod? És még itt, pár alap irány.
-- ha ebből, már a fejlesztésből szeretnél megélni, akkor az Arduino keretrendszert mindenestül kerüld el, lehetőleg nagyon-NAGYON messzire,
-- ha szeretnél hobbi szinten foglalkozni vele, akkor a fent említett Kristálytiszta Elektronika kiváló, de a net dugig van jó forrásokkal, kész oktatási anyagokkal (kezdve a Vault 1337 YouTube csatornájával, de fent van most a Kristálytiszta Elektronika is, de ezen kívül is baromi sok van, ha olvasni jobban szeretsz, az O'Reilly úgy 10 éve kiadott, és azóta legalább egyszer már frissített egy brutál jó könyvet a témában, azt ajánlom ISBN: 9781491903520 ),
-- ha csak egyetlen projektet akarsz megcsinálni, akkor, ha nem akarsz vele egészen sokat szívni, inkább bízz meg valakit, hogy vagy segítsen benne, vagy keress egy Maker-csoportot, ahol ezzel foglalkoznak (pl. itt, ezen a fórumon), vagy legvégső esetben bízz meg valakit, aki megcsinálja az egészet (valószínűleg ez lesz a legolcsóbb megoldás, de sok függ attól, hogy mi az ötlet és mi a célod vele), -- ha csak ki akarod próbálni, akkor... Vedd meg a legolcsóbb kezdőkészletet (Nano, ledek, kijelző, buzzer, esetleg szervó, hőmérséklet szenzor, rgb led, joystick), és építs belőle 3-4 dolgot. Ez szerencsés esetben 10 000 forintból megúszható.
Köszönöm így utólag is, legalább kezdem érteni, hogy az arduinosok által hangoztatott nano, meg uno, meg mega, stb. egyáltalán nem egymásra épülő dolgok, mindegyik másra való.
Azért jó lenne, ha az arduino-sok legalább annyi fáradtságot vennének, hogy csinálnának egy embereknek szóló leírást, hogy melyik termékcsaládjuk (?) mire jó, mert nagy a katyvasz.
Tipikusan az a deja vu érzésem, mint amikor tudományos kutatókkal hozott össze a sors, akik lelkesen és órákon át voltak képesek beszélni szakzsargonban, hogy milyen problémákat hogyan küzdöttek le, csak éppen azt nem voltak képesek negyed órás körmondatokban se elmagyarázni, hogy miről van szó.
Ez a hozzászólás elkerülte a figyelmemet. A Portenta X8 egy fejlesztői kártya. Az a célja, hogy a fejlesztő mérnökök viszonylag gyorsan (mondjuk 2-3 nap alatt) össze tudjanak rittyenteni egy olyan prototípust, amellyel egy későbbi termék működőképességét meg tudják vizsgálni. Nem kell külön a hardverrel szórakozni (kb. készen van), nem kell külön a szoftver egyes részeivel foglalkozni, mert kb. készen van, csak össze kell ollózni. Ha a terv (PoC) igazolódik, akkor nekilátnak és akár (kicsit) más eszközökkel az egészet nulláról lefejlesztik, hardvert, szoftvert, mindent. Ennek megfelelően ezen a kártyán nagyjából minden rajta van, amire egy ilyen koncepció tervezésekor és előzetes tesztelésekor szükség van: megfelelő táp, programozó és debug felület, sok kombinációs lehetőséget kínáló mikrokontroller, sok kivezetés, brutál erős (épp ezért szar fogyasztású) eszközök, stb. Tehát "mindent bele", nincs semmilyen szempontból optimalizálva. És hogy milyen későbbi késztermékek előzetes tervezéséhez jó: komoly adatfeldolgozási igényű, támogató/felügyelő rendszerekhez, ipari környezetben elsősorban, "okos", részben önálló, akár mesterséges intelligenciát is bevevő vezérlő-szabályozó-beavatkozó rendszerek alapjaként, támogatásaként, felügyeleteként szolgáló alrendszerekhez. Gyakorlatilag nincs benne »„az átlagnak” szóló alapfunkció«.
Mennyivel jobb egy Liebherr LTM-1450-8.1-et megvenni, mint egy Opel Mokát? Mennyivel jobb egy ARRI Alexa 35-öt megvenni, mint egy Panasonic Lumix GH5-öt? Mennyivel jobb egy Patek Philippe Grandmaster Chime-ot megvenni, mint egy Casio G-Shock-ot? Ha az elsőkre rá kellett keresned, alighanem érted, mi a helyzet. Szakmai szempontból. Az Uni/ESP32, de a Portenta X8 is egy-egy fejlesztőeszköz/család/termék/ökoszisztéma, ahogy vesszük. Adott célra lettek kitalálva, ahol a célok sokszor eléggé összemosódnak, illetve az Arduino keretrendszer (a Pro-t is beleértve) viszonylatában meglehetősen szabadon értelmezettek. A legfontosabb kérdés a cél, amire használni szeretnéd. Van, amire az X8 nem lesz jó. Van, amire az Auno (plusz ESP) nem lesz jó. Mindegyiknek vannak előnyei, hátrányai egy-egy szempontrendszer szerint, másképp fogalmazva, a tudáscsomagjuk jelentősen eltér egymástól. Köznyelviesen fogalmazva: durvára más ligában játszanak. (Az már személyes véleményem, hogy a Portenta hardverének semmi keresnivalója az Arduino keretrendszerében, a Pro-t is beleértve). Ilyen esetekben az a szavam járása, hogy ha meg kell kérdezned, akkor neked elég lesz az UNO + ESP kombó is.Nem kizárt, hogy tévedek, de ha leírod, hogy pontosan mit szeretnél megvalósítani, akkor értelmesebb, célirányos, használható(bb) választ tudok adni.
"Mennyivel jobb azt megvenni, mint külön UNO, ESP32, stb. elemeket?"
Ennek semmi köze se az Unohoz (Atmega328), se az ESP32-höz. Ez egy komplett Linuxos gép, ami mellett van még egy brutális teljesítményű mikrokontroller is.
Árban ugyan ott van, mintha megveszek sok egyebet.
Amúgy még mindig örülnék, ha lenne valaki, aki értelmesen válaszolna a kérdésre, hogy ez mi mindenre jó.
Amennyit angolul kisilabizáltam, a hivatalos weboldalon figyelmeztetés van, hogy a funkciók nagy része profik számára van, de egy betű sincs arról, hogy mire való "az átlagnak" szóló alapfunkció.
Nagyon vigyáznak, nehogy egyetlen értelmes mondatot is leírjanak, hogy mi célra gyártották. ;)
digitalWrite ( 0 , HIGH ) ; //előfeszítés digitalWrite ( 1 , HIGH ) ; //előfeszítés }
void loop() { if (digitalRead( 0 ) == HIGH && digitalRead(1) == LOW && digitalRead(10) == HIGH ) { digitalWrite(13, HIGH); analogWrite(3, 255); } else { digitalWrite(13, LOW); analogWrite(3, 55);
} }
Annyit bele kellett piszkálnom : így nem jó hogy digitalRead (D0) nem fordította le
helyesen digitalRead(0) így rendben
Nem mindig tudok belépni és fényképet betűzni de majd rendbe teszem a fiókom. Ezért nem tudta tegnap reagálni.
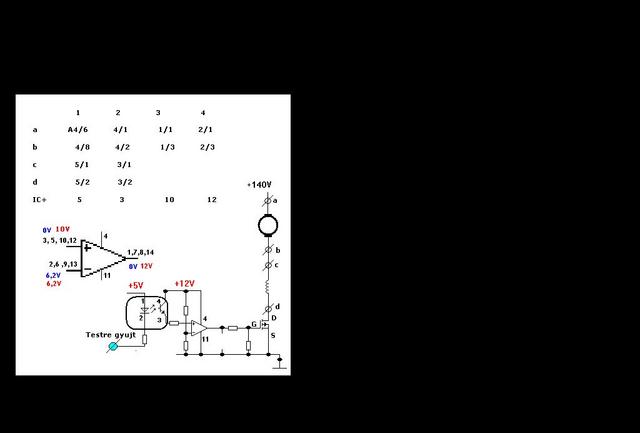
A triakos motorok optocsatolóval vannak vezérelve, a mosfetesek pedig optocsatolóval és LM324 es komparátorokkal , ezeket én is használom.
Lehetőleg egyszerre egy gombot nyomunk és a zavarok ellen megpróbálok 2-3 msec késleltetéseket beletenni.
Ami gond : van több Arduino UNO R3 panelem , de mind utángyártott és elég bizonytalanok , nem mindig csatlakoznak a laptophoz. 2 vagy 3 db kell a kimenetek száma miatt , lehet jobb a Arduino Mega , de ez nincs.
Jobb lenne I2C kommunikáció , kevesebb lenne a vezeték ehhez én vagyok Móricka.
Csak az lcd kijelző lesz 4 vezetékes.
Eredeti kezelőfelülete is 4 vezetékes volt.
Most elkezdem a hosszú menetelés , remélem nem kell többet kérdeznem ,de ha mégis ki kell tennem az elakadásjelző háromszöget akkor itt megtaláltok.
Prof ! Köszönöm a válaszod, én is valami hasonlóban gondolkodtam, csak még nálad is bonyolultabban.
LCD_Keypad.- al és egy UNOR3 panellel kísérleteztem .
- FEL pwm értékét növeli lcd.-én ellenőrzöm megy
- Le pwm értékét csökkenti lcd.-én ellenőrzöm megy
- BAL henger behúz pwm a D3.-on nem megy
- JOBB henger kitol pwm a D3.-on és D4.-en irányváltás nem megy
A feleségemnek fáj a dereka és vettünk egy masszázsfotelt csak úgy vakra, de tudtuk , hogy nem működik.
40.000Ft volt ez kb 5%.-a az újnak, a többi az én kockázatom.
Még csak hasonlót sem láttam , de már kitököltem, nagyjából miket kellene csinálnia.
A panelja nekem magas, mint nyúlnak a farzseb, a vezérléséből semmit nem tudok használni, újat csinálok.
Amit használok belőle : tápegységek : +5v , +12V ,+15V , +145VDC a motoroknak.
Ezek vannak benne :
- lábemelő motor 145VDC MOSFET vez. elektromos munkahenger fel és le + végállás kapcsoló
- háttámla döntés "" "" """ """ előre és hátra + végállás kapcsoló
- hátmasszírozó mozgatás 120VAC TRIAC menetes orsó fel és le mozgás + végállás HALL érzékelős
- masszírozó 145VDC MOSFET vez. egy irányba forog
- valami rezgető 145VDC MOSFET vez. egy irányba forog
- kompresszor 120VAC TRIAC egy irányba forog
- 3 + 3 + 2 pneumatikus szelep 24VDC , valami dögönyözés, még nem világos
- még egy rahedli szenzor , nem túl érdekesek.
Nehéz mint fene 95Kg és elfoglalja a fél szobát és csak a macska alszik benne.
Most már becsületem érdekében is meg kell csinálnom.
130 sorban írtam a lábemelő programot / ennek több mint fele monitor és kijelző program / de a kimeneti parancsok nem működtek.
Még kicsit játszom vele ,de ha nem jól működik , akkor a végállás vezérlést vagy kapuáramkörökkel vagy Omron ZEN minivezérlővel csinálom . Nagyon drága és kevés ki és bemenet .
Én a Cseh Róbert TAVIR anyagából kupálódtam ,de nekem is fura volt , hogy nem nagyon látok benne vezérlési példákat.
Ez még 3-4 hét , de majd tájékoztatlak mi lett vele , mert ez neked alanyi jogon jár a segítségedért.
Így azért egy soros kódot írni elég meredek... Több alapfeltevést tisztázni kell, amelyek elsősorban a logikát hivatottak rendbe tenni. Tehát.
Ha feltételezzük, hogy Arduino keretrendszerről van szó, a ki- és bemenetek természetes logikával működnek (vagyis az aktív állapot magas, a passzív állapot alacsony jelszintet jelent), akkor...
if (digitalRead(D4) && digitalRead(D0) == LOW)
{
digitalWrite(D2, HIGH);
analogWrite(D3, 255);
}
A másik:
if (digitalRead(D5) && digitalRead(D1) == LOW)
{
digitalWrite(D2, LOW);
analogWrite(D3, 255);
}
Viszont...
Alapvetően ez egy állapotgépes feladat. Pontosabban azzal lehet normálisan karbantartható módon, normálisan (egyszerűen) bővíthetően megcsinálni. A felső két kódrészlet elképesztően béna, szarul karbantartható, a potenciális lehetőségek töredékét használja csak ki, és minden, csak nem olvasható. Szóval alapvetően mindent, ami az Arduino keretrendszerben (és a hozzá kapcsolódó tengernyi mintában) rossz, azt hozza. Csak hirtelen: nincs prellmentesítés; nincs kezelve, hogy ha egyszerre mindkét gombot nyomod, akkor mi történik; nincs kezelve a DC motor áramszabályozása (fix 255 a kimenet értéke, vagyis 100% kitöltési tényező van); a logika "ha nyomod, megy" elvre épül, tehát nem az van, hogy gombnyomásra indul, hanem akkor, és csak akkor megy, ha nyomod a gombot.