//****************************************Define I2C LCD Display ********************************* #define I2C_ADDR 0x27 // Define I2C Address for the PCF8574T //---(Following are the PCF8574 pin assignments to LCD connections )---- // This are different than earlier/different I2C LCD displays
//**************************LCD Setup******************************** lcd.begin (16,2); // initialize the lcd // Switch on the backlight lcd.setBacklightPin(BACKLIGHT_PIN,POSITIVE); lcd.setBacklight(LED_ON); //***************************END LCD Setup********************************
Serial.println("Setting time"); setTheTime("304022129022016"); // ssmmhhWDDMMYYYY set time once in the given format
}
void loop() { char tempF[6]; float temperature; char buff[BUFF_MAX]; unsigned long now = millis(); struct ts t; // show time once in a while if (now - prev > interval){ DS3231_get(&t); //Get time temperature = DS3231_get_treg(); //Get temperature dtostrf(temperature, 5, 1, tempF);
lcd.clear(); lcd.setCursor(0,0);
lcd.print(t.mday);
printMonth(t.mon);
lcd.print(t.year);
lcd.setCursor(0,1); //Go to second line of the LCD Screen lcd.print(t.hour); lcd.print(":"); if(t.min<10) { lcd.print("0"); } lcd.print(t.min); lcd.print(":"); if(t.sec<10) { lcd.print("0"); } lcd.print(t.sec);
void printMonth(int month) { switch(month) { case 1: lcd.print(" January ");break; case 2: lcd.print(" February ");break; case 3: lcd.print(" March ");break; case 4: lcd.print(" April ");break; case 5: lcd.print(" May ");break; case 6: lcd.print(" June ");break; case 7: lcd.print(" July ");break; case 8: lcd.print(" August ");break; case 9: lcd.print(" September ");break; case 10: lcd.print(" October ");break; case 11: lcd.print(" November ");break; case 12: lcd.print(" December ");break; default: lcd.print(" Error ");break; } }
int Relay0 = 13; int Relay1 = 5; int Relay2 = 6; int Relay3 = 10;
DS3231 rtc(SDA, SCL); Time t;
const int OnHour0 = 17; const int OnMin0 = 30; const int OffHour0 = 17; const int OffMin0 = 31; const int OnHour1 = 12; const int OnMin1 = 26; const int OffHour1 = 12; const int OffMin1 = 27;
A hiba oka: A DS3231 osztálynak nincs olyan konstruktora, ami 2 paramétert kérne. Honnan vetted a példát, ami szerint meg kell neki adni az SDA és az SCL lábakat?
Jól megválasztott időalat, és reset a buli végén, vagy ha valami elhúzódik.
Szerintem menni fog.
A tápre teszek majd a végső nyák-on szűrés, a bementekre nem hiszem, hogy nagygon kellene. Optokapu van, az úgy előtétezve, hogy van még tartalék, ha megszaladna (kicsit) a bemeneti feszültség, ha elpukkantja a gazdája, akkor foglalatos; csere és mehet tovább.
Kifagyás esetén jó lenne a kimeneteket tartani, - kiindulva abból, hogy talán nem történik nagy változás a bementeken az alatt a néhány másodperc alatt, amíg a rendszer újraindul, - de attól tartok, hogy watchdog reset esetén törlődnek a kimenetek.... Persze vissza alehet állítani az utolsó állapotot, de akkor is lesz benne a rövid kiesés... Lehet, hogy a kimenetre tárolót kellene tenni, és ha kiesik alóla a Nano, akkor is marad minden vezérelve, ahogy volt.
A beépített watchdogot nagyon okosan kell paraméterezni, hogy ideálisan működjön, de nyilván megoldás. Én a külsők híve vagyok. Zavarszűrés mindennek az alkalmazási körülmények föggvényében: táp mindenképp, bemenetek, ha arra szükség van (szűrés, védelem). Az áramszünetes dologra Vargham írt jó megoldást, de még ha nem is akarod pontosan ugyanonnan folytati, akkor is lehet egy állapot, amit az aktuális bemenetek vagy az idő vagy valamely más paraméterek alapján beállít.
> Ezt folyamatosan tárolni kellene EEPROM területen, hogy ne vesszen el, ezzel viszont hamar elérném az EEPROM véges írási ciklusát, szóval ez sem jó...
Erre való az EERAM. Folyamatosan írsz bele, nem kopik, mert SRAM. Amikor elmegy a táp, azt érzékeli, és egy kondiban tárolt energia segítségével beírja a SRAM tartalmát a tokon belüli EEPROM-ba.
A 7805 nem melegszik, csak a Nano megy róla, a kimeneti driver IC nem sokat húz a kimeneteken. Persze a step-down a szép megoldás, de most így tesztre; jó lesz így.
Zavarszűrés a tápnak? Vagy zavarszűrés a bemenetekre? Melyikre gondolsz?
Nem terveztem bele watchdog-ot, mivel azt egy külső aktív elemnek kellene vinnie, pld. egy másik Ardu. És ha az fagy le?
Ha van erre valamilyen konkrét megoldásod; mindenképp érdekelne!
Áramszünet után a program az elejétől indul el. Ha onnan szeretném folytatni, ahol épp volt, akkor le kellene tárolnom EEPROM-ba egyrészt az összes kimenet értékét minden változáskor, valamint kellene egy programmutató, amit szintén. Ezt folyamatosan tárolni kellene EEPROM területen, hogy ne vesszen el, ezzel viszont hamar elérném az EEPROM véges írási ciklusát, szóval ez sem jó...
24V-->5V egy step-down nem lett volna jobb? Esélyes, hogy a 7805 durván melegedni fog. PLC-t zavarszűrés nélkül elég meredek dolog csinálni, pláne, ha kapcsolószekrénybe kerül.
Kis kínai Nano, nagy olasz Nano, nagy brit arm is le fog fagyni, ha úgy tartja kedve. És akkor lehet felmászni a létrán és resetet nyomkodni.
Az áramszüneti protokoll az, hogy áramkimaradás esetén hogyan tér vissza aktív állapotba, mit indít, ha programját honnan kezdi (ha kezdi egyáltalán).
Egyik sem "must have", de ettől függetlenül én hasznosnak találom ezeket a funkciókat, és felügyelet nélküli rendszerekbe integrálom is.
Specifikus kérdéseim: 1. illesztést a kimenő oldalon milyen IC-vel oldod meg? 2. Tápellátás, zavarszűrés?
3. Watchdog? Áramszüneti protokoll?
Érdekes a koncepció, de nem egyedülálló. Csináltak hasonló elven az ipari PLC-k árának töredékéért hasonló termékeket, bár a tiédtől némileg eltérő programozási koncepcióval.
Ami a lényeg; régóta szerettem volna építeni egy olyan PLC-t, ami mikrovezérlő alapokon nyugszik, és a költségei töredéke egy gyári PLC-nek.
Afféle "hobby" PLC-t, ami lehetőség szerint mindenben megegyezik a nagyokkal, de jóval olcsóbb. Otthoni automatizálásra, stb.
Régebben PIC alapon próbáltam, de az nagyon bonyolult volt, nem sikerült a végéig jutni.
Az Arduino sokkal kezesebb, és ha csak a saját nyelvén programozom is; majdnem a célnál vagyok.
Persze a végső cél az, hogy létrában lehessen programozni, és belső működés tekintetében kövesse egy valódi PLC logikáját.
Ehhez a PC alapú szoftver már kész, van egy általam írt PLC szimulátor, amelyet bővíteni szeretnék úgy, hogy az ott elkészített létra áttölthető legyen az Arduino-ba, és úgy fusson, mint az elvárható.
Tehát nem HEX állományt gyártanék, hanem olyankódot, amit az Arduino-ban található (már kész) program tárol és feldolgoz, újra és újra végrehajt ciklikusan, ahogy kell.
A PC szoftvert kell még bővíteni ezzel a tudással.
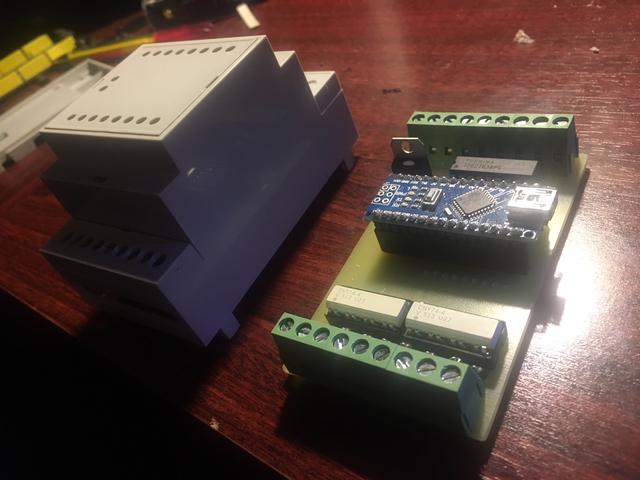
Maga a NYÁK, amit a fotón látsz, tulajdonképpen egy 24V-ra illesztő shield. Optocsatolós bemenete van, és driver-IC-s kimenete.
Ez méretre van tervezve egy olyan PLC-szerű dobozhoz, amit megadja a szükséges külsőt, C-sínre tehető, sorkapcsos csatlakozású.
AVR-en az int 16 bit szokott lenni. Ha biztosra akarsz menni, akkor kerüld az intet, és használj helyette pontosan mindig ugyanakkora méretű változót, például uint16_t vagy ha kellenek negatív számok is, akkor int16_t.
Minden digitális memória legkisebb egysége a bit, amikből nyolc egy byte. Ezeket aztán platformtól függően lehet csoportokba szervezni. Az AVR egy 8 bites platform, így a memóriája bájtonként van struktúrálva. Mivel az int 16 bit, ezért két bájton fér el. Ezt a két bájtot kell külön elraknod az EEPROMba, majd visszaolvasni, és összerakni integerré. Többféle megoldás is létezik erre, leírok neked hármat.
1 Bitműveletek
16 bites adat két bájtja:
uint16_t data = 1976;
uint8_t dataLowByte = (uint8_t) ((data) & 0xff);
uint8_t dataHighByte = (uint8_t) ((data) >> 8);
Ezután az alsó és a felső bájtot már könnyen kiírod.
Visszafelé pedig a fordítottja:
uint8_t dataLowByte = EEPROM.read(addressLow);
uint8_t dataHighByte = EEPROM.read(addressHigh);
uint16_t data = (dataHighByte << 8) | dataLowByte;
De az Arduinoban ezekre a gyakran használt műveletekre van makró is: